How electrical circuit connections are modelled in FEA
Technically speaking, electrical machines are very rarely modeled by pure finite element analysis (FEA). A permanent magnet machine running in open-circuit connection – i.e. no connection at all – could be, but that’s about it. In practically, any other situation, you have currents flowing in the machine. That’s how the power comes in (or goes out, for a generator) after all.
And these circuits are not usually modelled by FEA only. Unless you have a 3D model of both a motor and a generator producing the power, running on inertia alone. If you ever actually happen to manage to need such a simulation, let me know.
Nope, usually you have some sort of a circuit model included. Like a voltage or a current source producing the power for a motor, or an equivalent load stressing the generator. Additionally in 2D analysis, all your separate slot-bound conductors are also coupled together by an end-winding circuit.
So the common theme here is circuits. And that’s what today’s post is gonna be about.
Specifically, the difference between voltage and current supply, and why the latter is often the incorrect approach.
First, some definitions.
Current and voltage supply defined
So, what do current and voltage supply mean? Don’t you actually have both currents and voltages and everything going around in the machine?
Of course you do. But they can be modeled by different means.
With current supply, you simply exert your simulatory powers and decree that your induction machine shall have sinusoidal currents of 100 Amps rms running in each phase, separated by a 120-degree phase shift. Or square waves (or triangle) in the case of BLDC machines.
If you instead opt for voltage supply, it’s the voltages you fix. Duh. 400 V sinusoidal for the induction machine, or 48 Volt square-wave for the PM one.
Simple as that. So where’s the issue?
Why not current supply
Current supply works nicely – as in is accurate enough – when you have a largely resistive load. Like the armature of a DC motor in steady-state. Or an air-cored BLDC motor often used in model airplanes and helicopters.
It also works when you certainly, absolutely, know the current waveform in advance.
However, this is often not the case. Take a look at this SMEKlib example below.
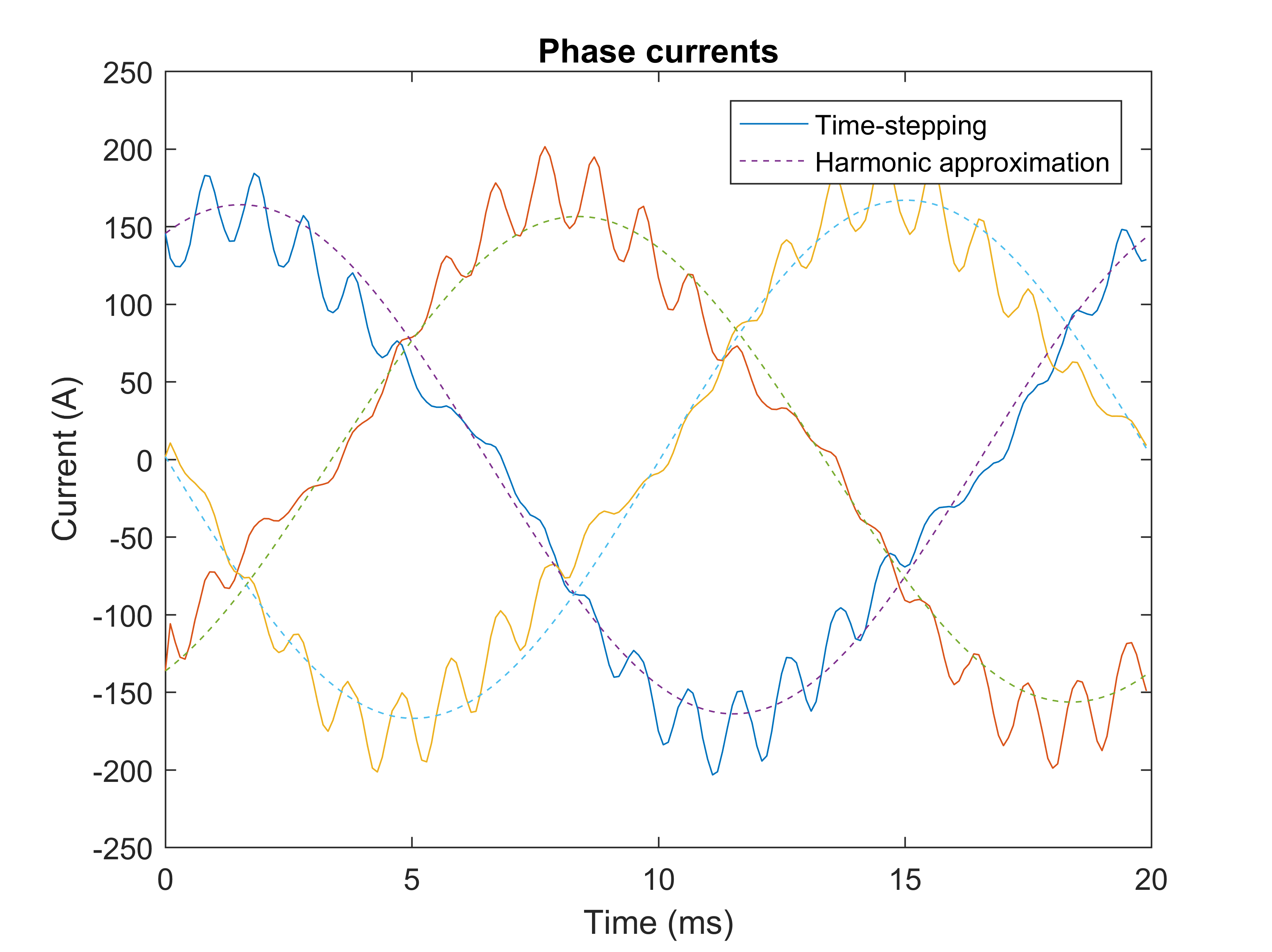
The figure shows both the idealized sinusoidal phase currents of a 37 kW induction machine, and those obtained from time-stepping FEA with voltage supply. When it comes to rms values, they are pretty much equal. But, as you can see, there’s a world of difference between the harmonics contents.
In other words, the true currents show considerable ripple that’s obviously missing from the sinusoidal approximation. If you designed your machine based on current-supplied simulations alone, you’d have lots of unexpected trouble with e.g. torque ripple later on.
(Disclaimer: the model illustrated here ignores the skewing of the machine, so the current ripple is of course exaggerated somewhat. By the way, I have sliced model under construction for SMEKlib, so stay tuned.)
The point being?
So again, what’s the issue? Can’t we simply supply our real, existing induction machine with currents rather than voltages?
In short, no. True current supply is notoriously difficult to come by, especially for a largely inductive load such as an electrical machine. As you hopefully remember from high school, an inductance fiercely opposes any change in the current flowing through it. Thus, arbitrarily changing the currents of a machine is no small feat. Very high voltages are needed for that. Infinitely high for a step-wise change in the current, to be exact.
Now, there exists something called a current source inverter. This elegant little (huge) invention operates by placing an even larger inductance inside the converter, in series with the machine. This inductance carries a DC current, and, being an inductance, wants to keep on carrying the same current ad infinitum. And since it’s a big once, it can pretty much force the machine currents to follow its will and word.
Obviously, this inductance is not infinite, so even here we don’t have a true current supply, but it’s still kinda close. Furthermore, this converter topology nowadays quite rarely used outside special applications. So my point still stands.
Another example
Furthermore, there’s one trivial example where specifying the currents is anything but trivial: cage windings. This includes both squirrel-cage induction motors, and the damper cages of synchronous machines.
While you technically could use an analytical model to guess the individual bar currents, my gut says the accuracy of the model would be severely limited by the analytical approach used. I don’t know if anybody has used this kind of an approach since the 80s.
Instead, cage windings are one of the first and best-understood examples of currents solved at runtime. See the thesis of my supervising professor for an example.
What to do instead
Since this post began with the introduction of two possible supply models, you can now probably guess which is the preferred one for many applications.
The answer is voltage supply. Obviously.
When using voltage supply, you don’t fix the currents in advance. Instead, you specify the voltage of the grid, battery, inverter, or whatever it is that’s supplying your machine. The currents are then obtained together with the field solution. It’s all based on Kirchhoff’s voltage law: the voltage drop (or gain) inside the FEA problem equals the supply.
So simplifying assumptions included on that front.
Why it’s not used
Although more physics-compliant, voltage supply is somewhat rarely used. This is for a very human, very understandable reason: it’s more difficult.
Alright, having a single bus-bar problem and fixing the voltage over it is relatively straightforward. However, electrical machines are usually a bit more complex than that.
They have several slots, often with several conductors each. And the conductors are connected in series with each other, with the current flowing to a different direction in different slots.
And that’s for a simplistic three-phase winding. That could probably be handled by most.
Things get even more complex once you add some parallel paths to the winding. Or, have a stranded winding, suddenly with dozens of parallel conductors in each phase. Or, want to include a more detailed inverter model to your problem. Or any of the million other complications.
How it CAN be used
Analyzing any complicated winding requires some additional circuit analysis. Specifically, the circuit is part is first manipulated symbolically, if you prefer fancy words. Or more simply put, some circuit equations are formed, typically using the loop method (see the Wikipedia entry about its simpler cousin).
The circuit analysis steps results in a matrix equation, describing the relationship between the circuit currents and voltages. This equation can then be easily appended to the field problem solved with pure FEA. Very shortly put, the conductors modelled within the finite element model appear as voltage sources in the circuit model. This so-called AVI formulation has been known since 1992 if I remember right.
This way, both the currents and voltages (and the field or potential) are solved at the same time. This is referred to as a strong coupling. You could also use a weak coupling, alternatively solving the circuit and field problems separately. But, this approach typically requires many iterations to converge, and is almost never used in this context.
Conclusion
Both current and voltage supply can be used when analyzing electrical machines with FEA. Current supply is easier to understand and can be directly coupled to the FEA model. However, it has one severe drawback: the currents have to be known in advance. Generally, this is easier said than done.
By contrast, voltage supply is inherently more realistic 95 % of the time. Thus, it is often more accurate, too. But alas, it’s more difficult to use, requiring some symbolic circuit analysis and a coupling to the FEA model.
Knowing how to do both appears to be a surprisingly rare skill.
Appendum: Your chance to learn:
This summer, I’m organizing a week-long intensive course on FEA, for some industry colleagues of mine. As you can probably guess, the course will heavily focus on circuit connections, after covering the basics of FEA.
Unfortunately, this course is an exclusive event.
However, I’m considering following it up with an open online course afterward. The contents have not yet been fully fleshed out, but it will follow the overall structure of the aforementioned intensive course. Meaning, roughly the following topics will be covered:
- Brief basics of finite element analysis: going from Maxwell’s to a matrix equation.
- Boundary conditions: their meaning and implementation.
- Time-dependency and eddy currents.
- Circuit coupling: basics of the AVI formulation.
- Analyzing complicated circuits.
This course might be the right choice for you, if you
- Have some experience in finite element analysis (you know what a mesh or boundary means).
- Are not afraid of some maths (integration by parts & substitution is as complex as it goes).
- Don’t expect a detailed course on how to use Comsol/Ansys/Cedrat/FEMM/insert-your-software-here.
- Need to perform better-than-basic analysis on electrical machines.
Checked at least the first three? Great!
Please enter your email address in the form below to receive some periodic updates on how the course is coming along. Do that even if you’ve already subscribed to my newsletter. If you haven’t, please do – you’ll get a nice free guide about boundary conditions, plus I’m working on another freebie about linear solvers.
Note that this “registration” is entirely non-binding – its only purpose is to register interest.
I’ll even sweeten the deal a bit and throw in a 20 % discount off the final course price for anyone who registers in advance! How’s that for a deal?
[contact-form][contact-field label=’Yes, keep me updated! (enter email)’ type=’email’/][/contact-form]
Hope to hear from you,
-Antti
Check out EMDtool - Electric Motor Design toolbox for Matlab.
Need help with electric motor design or design software? Let's get in touch - satisfaction guaranteed!