What are BLDC motors? How do they differ from AC motors?
Brushless DC motors are widely known over the Internet. They power drones and other RC craft, after all. Furthermore, they also see use in PC fans and the like.
On the other hand, electrical machines people know permanent magnet synchronous machines. They are, well, exactly what the name suggests: AC synchronous machines, with permanent magnets taking care of the magnetization.
But what exactly is the difference between a BLDC and a PMSM?
Not DC at all
Let’s start by clearing a small misnomer: BLDC motors are not DC motors in the truest sense. They are often supplied from batteries, yes, and batteries are very much a DC source. However, between the battery and the motor lies a small block of power electronics, making the motor currents and voltages alternate back and forth.
In other words, the motor is technically an AC motor. Meaning, a rotating magnetic field is created by means of alternating currents.
Sidenote: alright, most of the total field is due to the magnets alone. Meaning, removing the currents wouldn’t change the field much. But there would be a small difference – otherwise the motor couldn’t produce torque.
By contrast, a true DC motor features a static field and rotating conductors. Furthermore, they also utilize brushes – at least I’m not aware of anybody creating a brushless version of a true DC motor, ever.
Sidenote #2: As pointed out by Robert on LinkedIn, even typical (commutated) DC machines actually have alternating currents flowing in their armature windings. Considering this, you could say that only Faraday disks (and railguns) are true DC machines!
Waveforms, usually
What typically separates a brushless DC motor from a typical PM motor are its waveforms.
First of all, it’s back-EMF – the induced voltage – is often closer to trapezoidal rather than sinusoidal. On the other hand, many PMSMs also have rather blocky voltages, so that’s not a fully decisive feature.
More importantly, the phase currents of a BLDC motor are rectangular. Specifically, each phase is assumed to carry a constant positive current for one third of the time, constant negative current for another third, and no current at all for the final third.
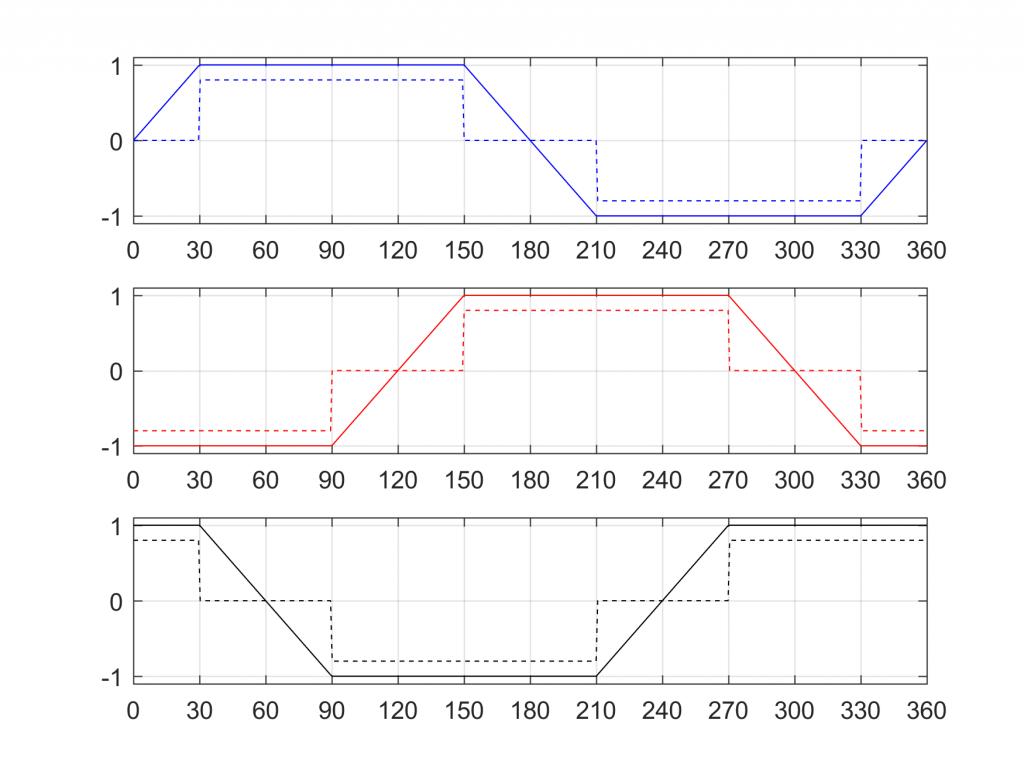
This is already quite different from other PM machines, whose currents are typically much more sinusoidal. They also cross zero very briefly – they don’t stay there for third of a period.
Another benefit of the rectangular current waveforms is that the total current is constant. Meaning, the current coming from the battery, in a typical application. So, from the battery’s point of view, a BLDC is indeed a DC motor!
Everybody loves exceptions
There’s one caveat, though. The waveforms I just described occur with the so-called trapezoidal modulation. (Modulation basically means how the voltage fed into the machine by its power electronics is varied with respect to time.)
However, also something called sinusoidal modulation exists. In this case, the current waveforms are closer to sinusoidal than square (and the back-emf waveform is whatever happens to specific to that particular motor; they cannot be changed much by modulation).
In other words, waveforms are not a 100% surefire way of distinguishing between BLDC motors and PMSMs.
Magnet placement, usually
Most commonly, BLDC motors have surface-mounted magnets on the rotor.
But again, not all surface-mounted PM motors are used as BLDC motors. Another stalemate.
Supply electronics
Perhaps the most decisive difference comes from the side of power electronics. BLDC motors, especially the smaller ones, are driven by compact inverters (often called simply ‘speed controllers’ in the RC circles). So no cupboard-sized boxes here, like you see with larger motors. Furthermore, the inverters/controllers are almost exclusively intended to be run from a battery or some other DC source.
Lightweight electronics are, in turn, made possible by the structure of the motor itself. Since BLDC motors often have surface-mounted magnets, their inductance will be low (the small size of the typical motor, compared with the low-ish voltage helps, too). Hence, heavy-duty protection against voltage spikes due to switching transients is not needed.
Furthermore, the large DC-link capacitor found in larger drives can often be omitted, too. This is for several reasons. The aforementioned low inductance certainly helps. Furthermore, with trapezoidal modulation the DC-side current will be quite smooth already at the motor terminals – no need to filter it with a capacitance to protect the rest of the power system. And the final reason is that the entire system is supplied by a constant DC voltage (battery, most commonly) rather than a rectifier. So, filtering is not needed to get a smooth DC-link voltage, as is the case with AC-supplied drives.

Conclusion
The exact definition of a BLDC motor is tricky, at least in terms of what separates it from other synchronous machines. Nevertheless, a huge majority of them are
– permanent magnet machines with surface-mounted magnets
– supplied with rectangular current waveforms
– fed from a battery or DC-grid via a compact inverter.
Check out EMDtool - Electric Motor Design toolbox for Matlab.
Need help with electric motor design or design software? Let's get in touch - satisfaction guaranteed!
Very nice paper on BLDC basics.
Thanks! 🙂
So, the decisive factors for a motor to be a BLDC or PMSM are strictly speaking do not belong to the motor design itself. It seems that term BLDC might have originated from technical illiteracy of application engineers who do not make a distinction between a motor and a power electronics package which controls it. They see it as a single unit which makes something to rotate from a DC voltage source. I believe any inverter fed motor without brushes falls into this category. Multiphase induction motor in steady state consumes DC current and constant voltage from the DC link of an inverter – so it is also a BLDC then. Can it be that BLDC is just a popular technically misleading but commonly adopted term? Should our community of machine designers stop using this abbreviation completely in favour of PMSM?
Yeah, I think that’s exactly the story behind the term. Calling them just PMSMs would be good, or maybe calling the entire package a ‘BLDC drive’ when appropriate.
First of all, huge fan of your blog, which (much to my regret) I discovered only recently. Afaik, people use(d) the acronym BLDC because the torque-speed curve (and whatnot) is more or less the same as that of a brushed-DC motor. Plus, ideally, during these 60°(el.) periods, there’s DC current flowing through two of the three phases. However, I wouldn’t go that far and call them PMSMs, since the rotor is not rotating in synchronism with the stator magnetic field, as the latter is actually changing in a “stepwise” fashion. Once, non-ideal back-EMF waveforms are considered, I personally like to use the term “Brushless PM Motors” (in accordance with Prof. Miller and Mr. Hendershot) to exclude induction machines. Thank you for your effort and keep up the good work! Best, Stefan
Thank you, very good points!
These (BLDC) are absolutely synchronous machines. Consider the fundamental (Fourier decomposition) of the applied current distribution and associated flux (in space). This component is what interacts with the fundamental component of the rotor flux to produce useful torque (in steady-state) when it rotates in time, most all of the other components contribute to heating. And in the case of concentrated windings, it is a harmonic (in space) of the winding/current distribution function that synchronizes with the rotor (e.g. the 9 stator slot, 8 pole rotor 3 phase BLDC motor is actually a two-pole three-phase winding that has a very strong fourth harmonic which then rotates synchronously with the fundamental 8 pole rotor field).
Pavel’s comments are spot on… and to Stefan’s comments, Tim and Jim did a bit of disservice to the topic if we were looking for a clean-cut technical definition. However, a more appropriate term (at the time PMSMs came into use) was trademarked (by GE, an “ECM” electronically commutated motor, is more precise description of the wider class) and they both understood the “family tree” of electric machines very well. So, “BLDC” is technical jargon rather than appropriately descriptive.
To understand the providence of “Brushless DC” one must first understand that this term does more to describe what this motor does not have with respect to the motors that it replaced (and had similar performance characteristics. The (brushed) “DC” motor ran from a DC source and the commutation occurred by mechanical switches turning on and off rotor circuits energized via the brushes. The rotor contained the mechanically commutating armature, while the field was fed by DC current from the same voltage source (series vs shunt windings notwithstanding).
Starting with that machine topology, then 1) replace the stator field coils with PMs 2) allow the PM field to rotate whilst holding the armature stationary 3) since the armature is stationary the brushes are no longer necessary, but rotary position sensors and electronic switches are now used to provide the commutation… at the operational/system level the motor behavior can be fairly similar with the biggest difference being that the motor no longer requires brushes that wear (with variable contact resistance and arcing) and must be replaced. One should be able to see with that heritage how the common jargon of “brushless” DC motor came about as the operating principles are very much in common with the DC motor rather than the more ubiquitous ac induction motor (at least at the time of inception).
Common in industrial motion control applications, “BLDC” is referred to the PM machine commutated from a regulated or unregulated DC source (the current is regulated to a fixed value, although ultimately still alternating) where the switching occurs at fixed positions (typically using hall effect sensors) in contrast to a “BLAC, Brushless AC” which is a PM machine where the current is regulated against a sine-wave (typically through pulse width modulation, sine-triangle with hysteresis band or space vector with field oriented control is common)… but the regulation of the current is to a sinusoidal waveform. BLDC vs. BLAC is absolutely about the drive not the motor, however because of these differences and the applications selected for each type of motor-drive system the motor has features/design details that are common in one type than the other.